This example shows a real simulation of a GPS signal generation and a software receiver tracking loop. The configuration file incorporates the following modules: "snSignalGenerate", "snLowPassFilter", "snNoise", "snADC", and "snSDRGPS".
The signal is defined as
signal = {
inphase = {
code = "C/A";
prn = 1;
modulation = "BPSK(n)";
n = 1.0;
data_type = "none";
data_bps = 50.0;
};
};
The same signal is defined for both signal generation and tracking. The configuration file example_02_gps.cfg is printed at the end of this page.
You can start it by running
cd snacs/trunk/release ./SNACS-release -f ../../examples/example_02/example_02_gps.cfg
This is a screenshot of the running simulation:
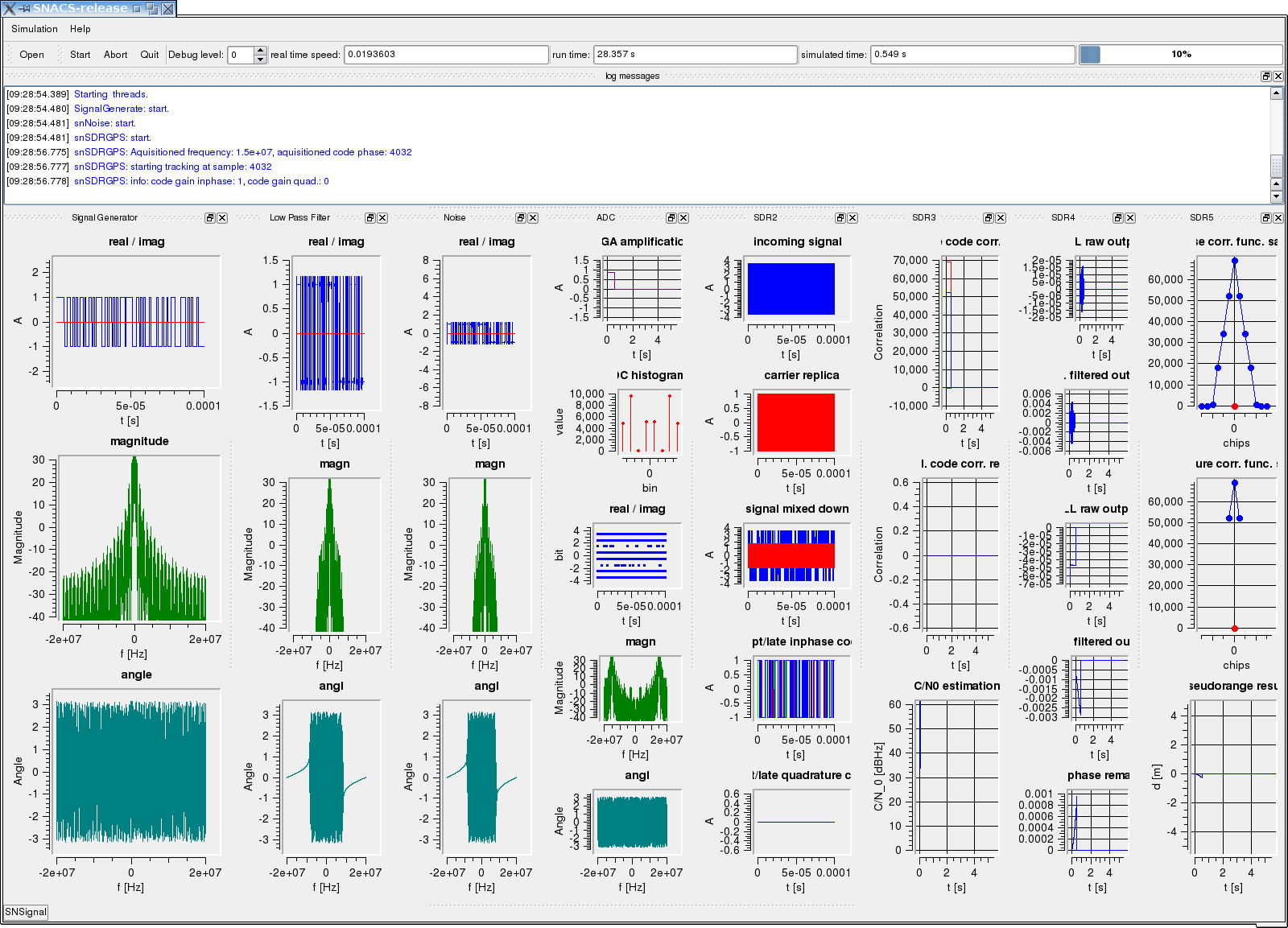
SNACS screenshot of example 02
You can use the MATLAB script plot_snacs_results_example02.m to plots the results:
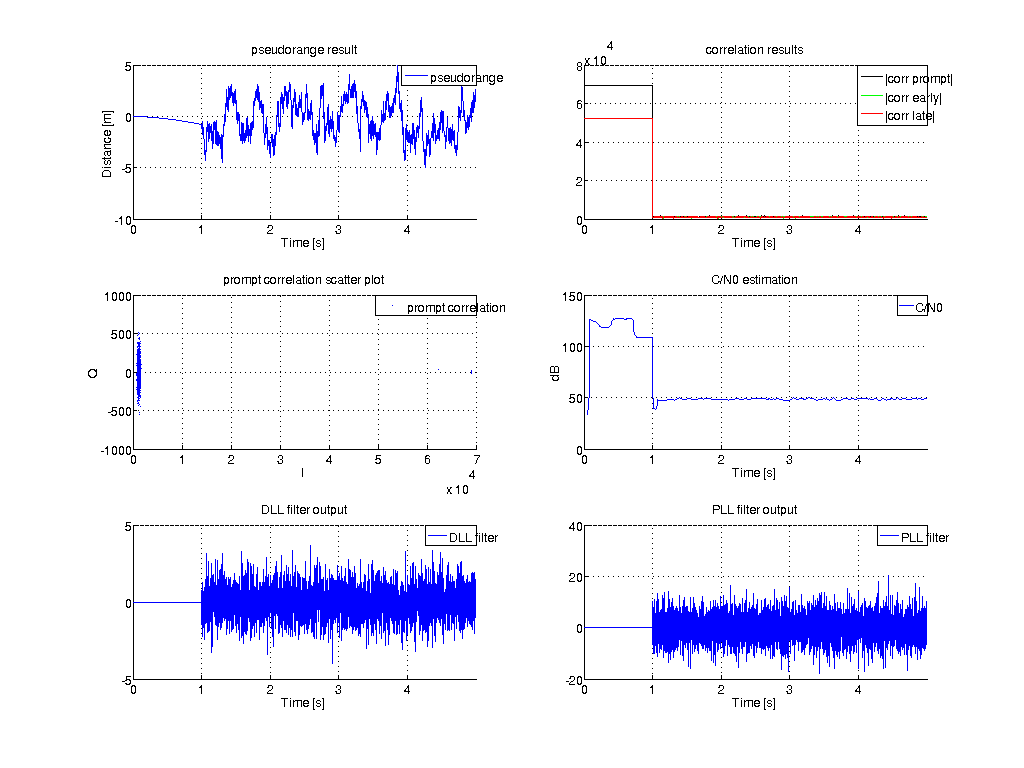
SNACS simulation result of Example 02
This is the complete SNACS configuration file:
